歩行者検出システムの説明と操作
自動車メーカーは、すべての道路利用者の安全性を向上させ、怪我のリスクを最小限に抑えるためにたゆまぬ努力をしています。 方法のXNUMXつは、歩行者との衝突を回避することです。 以下は、歩行者検出システムの機能、それらがどのように配置され、機能するか、およびそのようなソリューションを使用することの長所と短所です。
歩行者検出システムとは
歩行者検出システムは、道路利用者との衝突による影響を防止または最小限に抑えるように設計されています。 この機能を使用することで、事故件数を0%に減らすことはできませんが、事故による死亡率を20%削減し、重傷を負う可能性を30%削減します。
主な問題は、論理的な実装の複雑さにあります。 プログラムの使用や歩行者を検出する技術的手段に問題はありません。 命を救うことになると、危機的な状況での動きの方向と人間の行動を予測する段階で困難が生じます。
システムの目的と機能
このシステムの主な目的は、車両が歩行者に衝突するのを防ぐことです。 テスト結果は、ソリューションが最大35 km / hの速度でうまく機能し、最大100%の衝突を排除することを示しました。 車が速く動いているとき、システムは物体を正しく認識して時間内に反応することができないため、完全な安全性は保証されません。 システムの主な機能:
- 歩行者検出;
- 危険な状況の分析と衝突の可能性の評価。
- ドライバーに脅威について知らせる音。
- 速度の自動低下または移動軌道の変更。
- 車両の完全停止。
システムはどの要素で構成されていますか?
このシステムは、車両に特別なソフトウェアとハードウェアを装備することで操作できます。 含まれるもの:
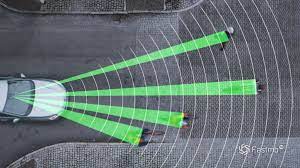
- 前面に取り付けられたカメラとレーダー-車両の前の道路をスキャンし、最大40メートル離れた物体を認識します。
- コントロールユニットは、歩行者検出装置から情報を受け取る電子装置です。 ユニットは、システムを構成および制御し、衝突の脅威が発生した場合にドライバーに通知するように設計されています。
- ソフトウェア-歩行者やその他の物体を認識する方法、状況を予測および分析する正確さ、緊急の場合の意思決定に責任があります。
最新のシステムを技術的に実装することで、道路の状態や障害物の存在を分析し、安全な移動軌道を計算することができます。
論理と動作原理
歩行者検出システムは、半径40メートル以内の領域をスキャンします。 物体がカメラによって検出され、これがレーダーによって確認された場合、物体は追跡を継続し、動きを予測します。 状況が重大なレベルに達すると、ドライバーは可聴通知を受け取ります。 反応の欠如は、自動ブレーキ、軌道変更、または車両停止を引き起こします。 原則のXNUMXつは、歩行者を認識するために使用されます。
- 全体または部分的な検出。
- データベースからサンプルを検索します。
- 複数のカメラの結果を使用します。
より大きな効果を得るために、いくつかのオプションが組み合わされ、エラーと作業中のエラーの最小化が保証されます。
異なるメーカーのシステムの名前と違い
当初、ボルボは歩行者の安全を考えていましたが、TRWやスバルにも同様のシステムが登場しました。
- ボルボの歩行者検出システム(PDS)-XNUMX台のカメラを使用してエリアを読み取ります。
- TRWによる高度な歩行者検出システム(APDS)-カメラとレーダー。
- スバルのEyeSight-XNUMX台のカメラとレーダーなしで道路利用者を検出します。
技術的な実装に関係なく、すべてのシステムには同様の動作原理とXNUMXつの目的があります。
利点と欠点
技術的な解決策は、車の移動をより快適で安全にします。 歩行者検出システムの主な利点:
- 事故の数を減らす。
- 最大100km / hの速度での35%衝突の防止。
- 事故による危険な怪我や死亡率のレベルを下げる。
- 交通安全の向上。
欠点の中で、注目に値するものは次のとおりです。
- システムの限られた選択肢;
- 高速での作業の複雑さ。
- 高コスト。
技術の発展により、これらの問題は解消されます。
自動運転車と交通安全に対するメーカーの意欲は、事故の減少につながります。 将来的には、物体認識、脅威予測、衝突回避の品質が向上することが期待されます。 これにより、高速でも事故を回避できます。
