アウディの四輪駆動車 - Quattro
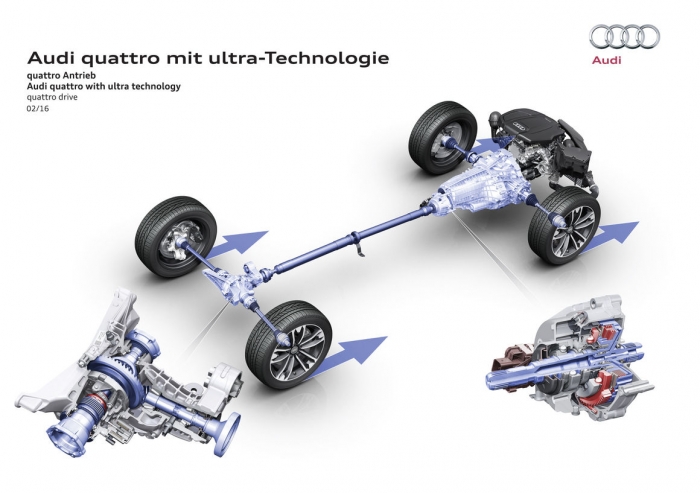
クワトロは、アウディ車に採用されている独自の全輪駆動システムです。 デザインはSUVから借用したクラシックなレイアウトで作られており、エンジンとギアボックスは縦方向に配置されています。 インテリジェント システムは、道路状況とホイール グリップに応じて最高の動的パフォーマンスを保証します。 これらの車は、あらゆる種類の路面上で優れたハンドリングとグリップを発揮します。
クワトロの誕生の経緯
同様の全輪駆動設計の車が 1980 年のジュネーブ モーター ショーで初めて発表されました。 プロトタイプはフォルクスワーゲン イルティス軍用ジープでした。 1970 年代後半の開発中のテストでは、滑りやすい雪道での優れたハンドリングと予測可能な動作が実証されました。 全輪駆動ジープのコンセプトを車のデザインに導入するというアイデアは、アウディ 80 シリーズ クーペに基づいていました。
ラリーレースにおける初代アウディ クワトロの一貫した勝利は、全輪駆動コンセプトの正しさを証明しました。 主な議論はトランスミッションのサイズであった批評家たちの疑念に反して、独創的な工学的解決策がこの欠点を利点に変えました。
新型アウディ クワトロは優れた安定性を誇ります。 したがって、トランスミッションのレイアウトのおかげで、車軸に沿ったほぼ完璧な重量配分が可能になります。 1980 年の全輪駆動アウディは、ラリーの伝説となり、独占的な量産クーペとなりました。
全輪駆動システム「クワトロ」の開発
第一世代

第一世代のクワトロ システムには、機械式ドライブによる強制ロックが可能なセンターおよびクロスアクスル ディファレンシャルが装備されていました。 1981 年にシステムが変更され、インターロックが空気圧によって作動するようになりました。
モデル:Quattro、80、Quattro Cupe、100。
第二世代

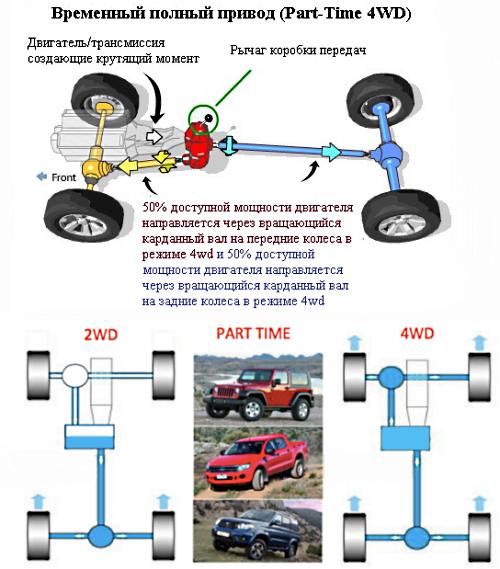
1987 年に、フリー センター アクスルの代わりに Thorsen タイプ 1 セルフロック リミテッド スリップ ディファレンシャルが採用され、このモデルはドライブ シャフトに対してサテライト ギアが横に配置されていることが特徴でした。 通常の状態ではトルク伝達は 50/50 で変化し、スリップ時には最大 80% のパワーが最高のトラクションで車軸に伝達されました。 リアディファレンシャルは時速25km以上で自動ロック解除機能が装備されています。
モデル:100、クワトロ、80/90クワトロNG、S2、RS2アバント、S4、A6、S6。
III世代
1988 年には電子ディファレンシャル ロックが導入されました。 トルクは、路面への接着の強さを考慮して車軸間で配分されました。 EDS システムによって制御が行われ、牽引輪の速度が低下しました。 電子機器は、センターとフリーフロントディファレンシャルの多板クラッチロックを自動的に接続しました。 トルセン リミテッド スリップ ディファレンシャルはリア アクスルに移動されました。
IV世代
1995年 - 前後フリータイプデフの電子ロックシステムを搭載。 センターディファレンシャル - Torsen タイプ 1 またはタイプ 2。通常のトルク配分モードは 50/50 で、パワーの最大 75% を XNUMX つの車軸に伝達できます。
モデル:A4、S4、RS4、A6、S6、RS6、オールロード、A8、S8。
V世代
2006年には、Torsen Type3非対称センターディファレンシャルが導入されました。 前世代の特徴は、サテライトがドライブ シャフトと平行に配置されていることです。 センターデフは電子ロック付きでフリーです。 通常の状態でのトルク配分は 40/60 の割合で発生します。 スリップするとパワーはフロント70%、リア80%に増加します。 ESPシステムの採用により、トルクを最大100%アクスルに伝達することが可能になりました。
モデル:S4、RS4、Q7。
VI生成
2010 年、新型アウディ RS5 の全輪駆動の設計要素は大幅に変更されました。 フラットギヤインタラクション技術をベースとした自社開発センターデフを搭載。 トルセンと比較して、さまざまな運転条件下で安定したトルク配分を実現する、より効率的なソリューションです。
通常の動作では、フロントアクスルとリアアクスルの出力比は 40:60 です。 必要に応じて、ディファレンシャルはパワーの最大 75% をフロント アクスルに、最大 85% をリア アクスルに伝達します。 制御電子機器への統合が容易になります。 新型ディファレンシャルの採用により、タイヤの路面への密着力や動きの性質、ドライビングスタイルなど、あらゆる状況に応じてクルマの運動特性が柔軟に変化します。
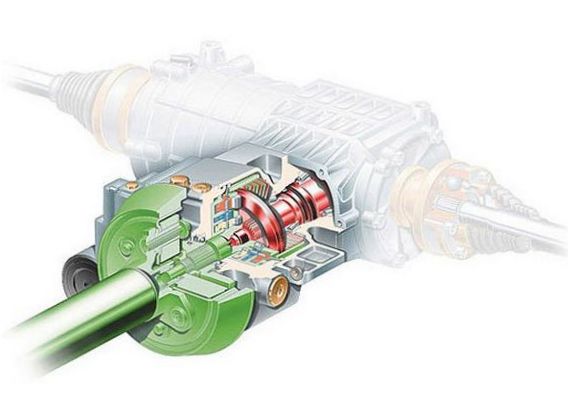
最新のシステム設計
最新のQuattroトランスミッションは、次の主要な要素で構成されています。
- 伝染;感染。
- XNUMXつのハウジングにトランスファーケースとセンターデフ。
- メインギヤは、構造的にリアディファレンシャルハウジングに組み込まれています。
- センターディファレンシャルからドリブンアクスルにトルクを伝達するカルダンユニット。
- フロントアクスルとリアアクスルの間で動力を分配するセンターディファレンシャル。
- 電子ロック付きフリータイプフロントデフ。
- 電子ロック付きリアフリーホイールディファレンシャル。

Quattro システムは、エレメントの信頼性と耐久性が向上していることが特徴です。 この事実は、アウディの XNUMX 年にわたる生産車とラリー車によって裏付けられています。 これまでに発生した障害の多くは、不適切な使用または過度の使用によって発生しました。
クワトロの仕事内容
Quattro システムの動作は、ホイールスリップ中の最も効率的な力の分散に基づいています。 電子機器はアンチロック ブレーキ システムのセンサーからの読み取り値を読み取り、すべての車輪の角速度を比較します。 ホイールの XNUMX つが限界を超えると、ブレーキがかかります。 同時にディファレンシャル ロックが作動し、トルクが最適なグリップでホイールに適切な割合で配分されます。
エレクトロニクスは実証済みのアルゴリズムに従ってエネルギーを分配します。 さまざまな走行条件や路面における車両挙動の無数のテストと分析の結果として作成された動作アルゴリズムは、高い予防安全性を保証します。 これにより、困難な状況でも運転を予測できるようになります。
使用されているロックと電子制御システムの有効性により、全輪駆動のアウディ車は、どんな路面でも滑ることなく発進することができます。 この特性により、オフロード走行に優れた動的特性と機能が提供されます。
プロたち
- 優れた安定性とダイナミクス。
- 優れたハンドリングと操縦性。
- 高信頼性。
コンズ
- 燃料消費の増加。
- ルールと動作条件に対する厳しい要件。
- エレメントが故障すると高額な修理費がかかる。
Quattro は、ラリー レースの時間と最も過酷な条件によって証明された、究極のインテリジェント全輪駆動システムです。 最新の開発と最高の革新的なソリューションにより、何十年にもわたってシステムの全体的な効率が向上してきました。 アウディ全輪駆動車の優れた走行特性は、30 年以上にわたって実際にそのことを証明しています。