フロントまたはリアの四輪駆動の方が良い
車内のドライブは、エンジンから任意のホイールへのトルクの伝達であり、それがドライブになります。 したがって、すべての車両は、最初の桁が車輪の総数を意味し、XNUMX番目の桁が駆動する車輪の数を意味する車輪式などの重要な特性を持ち始めます。

しかし、このコンセプトは、自動車のシャーシの別の重要な特性を反映していません。どの車軸が、リアまたはフロントのパートタイムドライブでリードしていますか? 全輪駆動車の場合、4×4または6×6でさえ、これは問題ではありません。
四輪駆動とは、リアとフロントの違い
それぞれのタイプには独自の長所と短所があるため、それらは依然として相対的なバランスで存在します。 理論的な観点から、前輪または後輪駆動車は、牽引力を一方または他方の車輪に伝達する伝達部品を単に排除することによって、全輪駆動車から得られます。 実際、テクノロジーを実現するのはそれほど簡単ではありません。
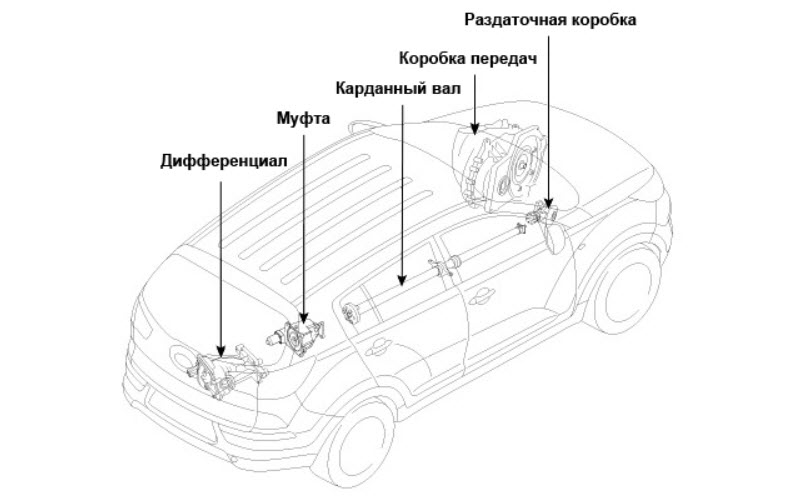
全輪駆動車の必須ユニットは、車軸に沿ってトルクを分配するトランスファーケースまたはトランスファーケースです。
モノドライブ車では必要ありませんが、除外することはできません。razdatkaはパワーユニットの一般的なスキームに統合されているため、車全体が再配置される可能性があります。
反対の場合のように、たとえば同じモデルの前輪駆動車のように、最初に全輪駆動の変更がラインに追加されると、これは非常に複雑になります。
多くのメーカーは、ハッチバックとセダンに4×4バージョンを追加しようとさえしていません。そのため、最低地上高とクロスモディフィケーション用のプラスチック製ボディキットの増加に限定されています。
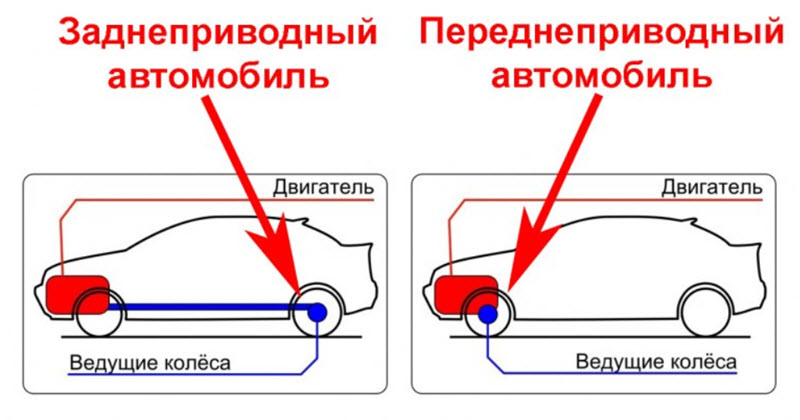
これは、全体的なレイアウトにも当てはまります。 歴史的に、前輪駆動車では、パワーユニットがエンジンコンパートメントの向こう側に配置され、ギアボックスには、同時に駆動および制御される前輪につながる等速ジョイント(CVジョイント)を備えたXNUMXつのシャフトが装備されていることがすでに開発されています。
逆に、後輪駆動の場合、ボックス付きのモーターは車の軸に沿って配置され、ドライブシャフトは後車軸に移動します。 四輪駆動は、これらの両方の場合で、さまざまなレベルの複雑さで実装できます。
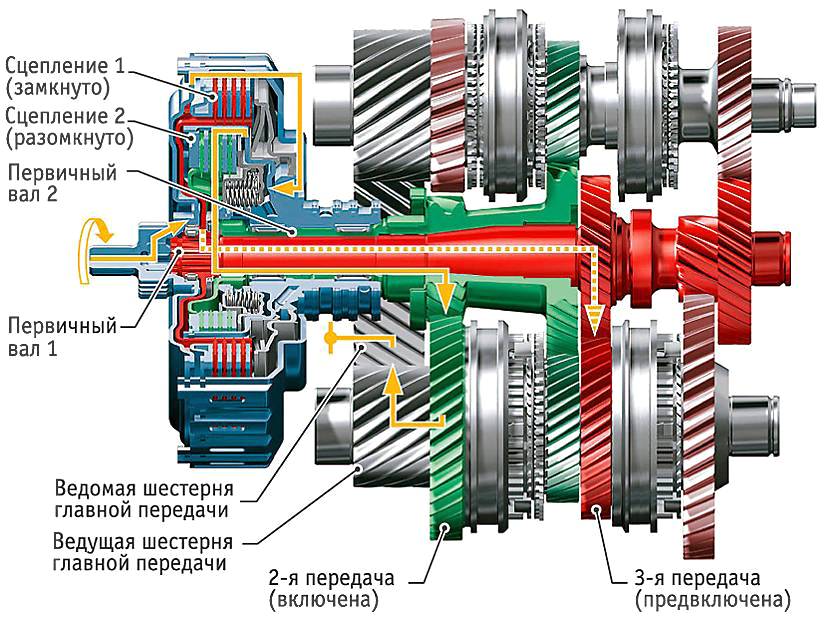
装置と動作原理
トルクを伝達するために、伝達を形成するコンポーネントとアセンブリのセットが使用されます。
それは以下を含む:
- 総ギア比、つまり、駆動輪の速度に対するエンジンシャフトの回転速度の比率の変更を担当するギアボックス(ギアボックス)。
- トランスファーボックス、ドライブアクスル間でトルクを所定の比率(必ずしも均等ではない)で分割します。
- さまざまな角度で距離を置いて回転を伝達するCVジョイントまたはHookeのジョイント(クロス)を備えたカルダンギア。
- ドライブアクスルギアボックス、さらに回転速度とトルク伝達の方向を変更します。
- ギアボックスとホイールハブを接続するアクスルシャフト。

すでに述べたように、横方向と縦方向のパワーユニットの特徴であるXNUMXつの主要なものが、スキームのセット全体から際立っていました。
- 最初のケースでは、トランスファーケースはギアボックスの側面に取り付けられていますが、アンギュラーギアボックスとも呼ばれます。 レイアウト上の理由から、前輪の90つのドライブシャフトが通過します。ここでは、回転がXNUMX度回転し、それに沿って走るカルダンシャフトに向かうハイポイドギアを備えたギアペアによって、モーメントがリアアクスルに除去されます。車。
- 180番目のケースは、ギアボックスの出力シャフトと同じ軸上にトランスファーケースを配置することを特徴としています。 後輪へのカルダンシャフトはトランスファーケースの入力シャフトと同軸に配置され、前輪は同じカルダントランスミッションを介して接続されていますが、XNUMX度回転して下または横にシフトします。
razdatkaは非常に単純で、瞬間の分岐のみを担当する場合もあれば、国を超えた能力や可制御性を高めるために追加の機能が導入された場合は複雑になる場合もあります。
- デマルチプライヤー、つまり、路上でトルクを乗算するためのオーバードライブ。
- 与えられた比率でモーメントを分配するセンターディファレンシャル。
- トランスミッション機能の自動制御システムのアクチュエータとして機能する電磁摩擦クラッチ。
- 追加の装置へのパワーテイクオフシャフト。
4×4マシンのドライブアクスルギアボックスも、制御されたディファレンシャルまたは電子クラッチの存在によって複雑になる可能性があります。 XNUMXつの車軸の強制ロックと個別のホイール制御まで。
全輪駆動の種類
さまざまな運転モードでは、ホイール間のトルクを再配分して、一方では効率を高め、他方ではクロスカントリー能力を高めることが非常に役立ちます。 さらに、トランスミッションが複雑になるほど高価になるため、マシンのタイプとクラスが異なれば、使用するドライブ方式も異なります。
恒久的な
最も論理的なのは、常にすべての道路状況で全輪駆動を使用することです。 これにより、反応の予測可能性と、状況の変化に対するマシンの絶え間ない準備が保証されます。 しかし、これは非常に高価であり、追加の燃料費が必要であり、常に正当化されるとは限りません。
パーマネント全輪駆動(PPP)の古典的なスキームは、そのシンプルさのすべてにおいて、時代を超えたソビエト車Nivaで使用されています。 縦置きエンジン、次にボックス、ギアトランスファーケースが短いカルダンシャフトを介して接続され、そこからXNUMXつのシャフトがフロントアクスルとリアアクスルに接続されます。
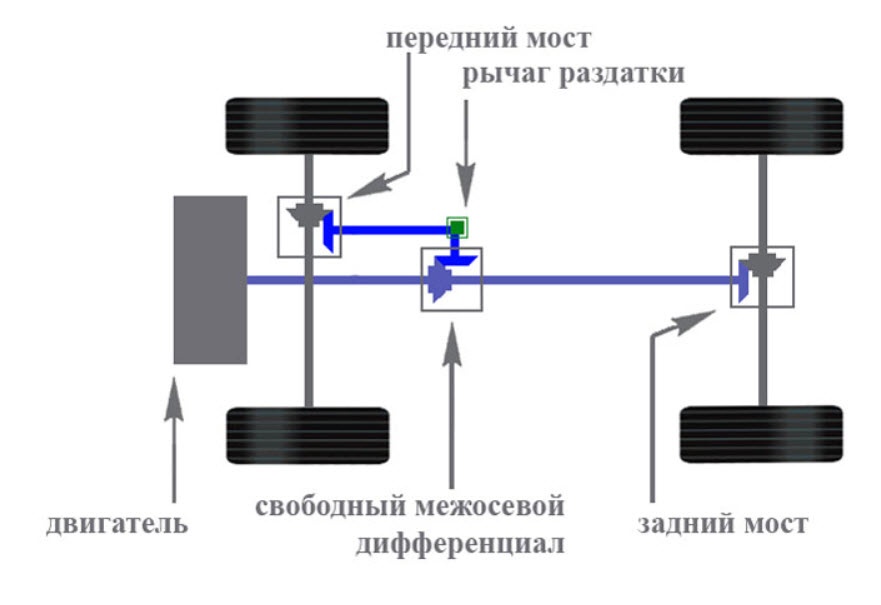
前輪と後輪が異なる速度で回転する可能性を確保するために、これはコーナーの乾いた舗装で重要です。トランスファーケースには軸間フリーディファレンシャルがあり、少なくともXNUMXつの駆動輪をオフにするためにブロックできます。 -他のXNUMXつが滑ったときの道路。
デマルチプライヤもあり、同じ速度の低下で推力が約XNUMX倍になり、比較的弱いエンジンに大いに役立ちます。
駆動輪のXNUMXつが停止するまで、駆動輪には常にトルクがかかります。 これがこのタイプのトランスミッションの主な利点です。 その動員を手動で考えたり、複雑な自動化を作成したりする必要はありません。
当然、PPPの使用はXNUMXつのNivaに限定されません。 多くの高価な高級車に使用されています。 問題の価格が実際には重要ではない場合。
同時に、トランスミッションには、主に過剰電力による可制御性を向上させるために、大量の追加の電子サービスが供給されます。このスキームにより、これが可能になります。

自動
追加のドライブアクスルを自動装置に接続することには多くのバージョンがあり、BMWや他の多くのプレミアムで使用される、XNUMXつの特定のスキームを区別できます。また、後輪駆動のクラッチは、マスクロスオーバーに一般的です。
最初のケースでは、すべてが電子ドライブを備えたrazdatkaのクラッチに割り当てられます。 このクラッチをオイルに固定または溶解することで、軸に沿ったモーメントの分布を広範囲にわたって変化させることができます。
通常、強力なエンジンで始動するとき、メインドライブの後輪がスリップし始めると、前輪がそれらを助けるために接続されます。 他にも再配布アルゴリズムがあり、それらは多数のセンサーの読み取り値を読み取るコントロールユニットのメモリに組み込まれています。
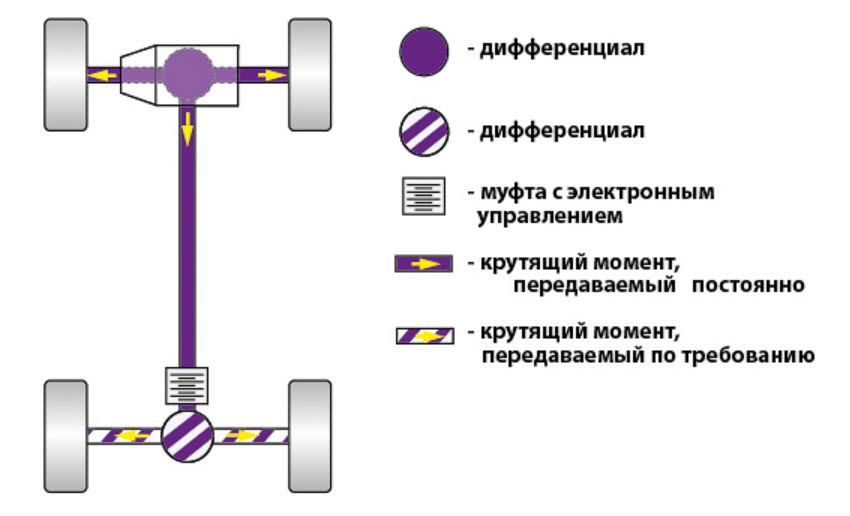
XNUMX番目のケースも同様ですが、メインホイールはフロントで、リアホイールはカルダンシャフトとアクスルギアボックス間のカップリングを介して短時間接続されます。
クラッチはすぐに過熱しますが、長時間作動することは期待できません。滑りやすい路面や困難な方向転換で、車をリアアクスルにわずかに押し込む必要がある場合があります。 これは、4×4の変更でほとんどすべてのクロスオーバーが構築される方法です。
強制
恒久的な作業場所が舗装から外れているユーティリティSUVで使用される、最も単純で最も安価なタイプの全輪駆動。 リアアクスルはコンスタントドライビングアクスルとして機能し、必要に応じて、ドライバーはディファレンシャルなしでフロントアクスルを強くオンにすることができます。
したがって、硬い路面では、車は後輪駆動である必要があります。そうしないと、トランスミッションが損傷します。 しかし、そのような機械は安全性に大きなマージンがあり、修理が簡単で安価です。
多くの輸入ピックアップとSUVにはそのような変更があり、より高度なオプションのドライブバージョンでは高価で複雑な場合があります。
4WD(4x4)の長所と短所
マイナス、実際にはXNUMXつ-問題の価格。 しかし、それはどこにでも現れます:
- 最初は車がより難しいので、購入するときは高価です。
- 多くの場合、修理が必要であり、機器が多いほど、信頼性は低くなります。
- 追加の回転部品により、燃料消費量が増加します。
- 重量が増加し、ダイナミクスと効率に影響します。
- ユニットのレイアウトがますます複雑になり、メンテナンスの複雑さに反映されます。
他のすべてはメリットです:
- 完璧なクロスカントリー能力、すべてのホイールにトルクがかかっています。
- 制御された車軸に追加の推力ベクトルがあるため、機械はより適切に制御されます。
- 滑りやすい路面でのダイナミクスの改善、タイヤのスリップ頻度の低下。
- 推力の再分配は、部品の強度の要件を減らします。
- タイヤのトレッドゴムはより均一に摩耗します。
これらすべてにより、価格への追加がそれほど重要ではない強力で高価なマシンで全輪駆動を広く使用することが可能になります。
四輪駆動車の運転方法
全輪駆動のすべての可能性を実現するためには、特定の車の設計上の特徴を研究し、その伝達方式がどのように機能するかを理解する必要があります。
- アスファルトにセンターデフのないプラグイン全輪駆動を使用しないでください。これにより、急速な摩耗が発生します。
- コーナーの滑りやすい路面での運転を練習するために、多くの場合、全輪駆動車、特にフリーディファレンシャルまたは自動トルク伝達を備えた車は、前輪駆動から後輪駆動に、またはその逆に動作を変えて、予期しない動作をする可能性があります。 そして、正反対の戦術でターンでアクセルペダルを操作する必要があります。トラクションを追加する車は、ターン内のスキッドで消えるか、フロントアクスルをスライドさせ始めることができます。 同じことが、始まったリアアクスルスキッドのダンピングにも当てはまります。
- 冬の4×4の良好な安定性は、ドライバーにとって突然失われる可能性があります。 モノドライブ車は常に事前にトラクションの喪失を警告するため、これに備える必要があります。
- 優れたクロスカントリー能力は、泥の「待ち伏せ」や雪原への思慮のない訪問につながるべきではありません。 トラクターなしでこのような状況から抜け出す能力は、トランスミッションの自動化能力よりも、選択したタイヤに大きく依存します。
同時に、合理的な運転戦略では、全輪駆動車は常にモノドライブがはるかに早く入るトラブルを回避するのに役立ちます。 使いすぎないでください。

将来的には、すべての車が全輪駆動になります。 これは、電気自動車の技術の進歩によるものです。 各ホイールに電気モーターと高度なパワーエレクトロニクスを備えたスキームを実装するのは非常に簡単です。
これらの車は、ドライブのタイプに関するエンジニアリングの知識を必要としなくなりました。 ドライバーはアクセルペダルのみを制御し、残りは車が行います。